
Всі ми звикли поняття «надійна опора» пов'язувати з твердою поверхнею. Для автомобіля - це земля. Міцніше не придумаєш. Будь-хто може спробувати і відчути. Повітря ж - субстанція ненадійна, але саме вона є, так би мовити, місцем існування численної армії апаратів важчих за повітря, літаків і вертольотів. 
Літак L-410. Добре видно сервокомпенсатор керма висоти і керма напряму.
І саме вона ж надає їм великі можливості, роблячи перебування цих металевих птахів в сотнях і тисячах метрів над землею цілком комфортним.
Специфіка, зрозуміло, тут інша, і хоча певні терміни, які використовуються для машин, що пересуваються по твердій поверхні на 4-х колесах для літака звучать також, на цьому схожість, в общем-то, і закінчується.
Стійкість, керованість, балансування, центрування. Без всього цього і ще багато чого іншого в повітрі не обійтися. Причому всі ці речі часто між собою пов'язані.
Для розкриття своїх можливостей літак використовує аеродинамічні поверхні.
Весь рух і орієнтація його в повітрі засноване на дії різних сил і моментів, велика частина з яких в тій чи іншій мірі носить аеродинамічну природу. Ці сили і породжувані ними моменти формуються при взаємодії аеродинамічних поверхонь з повітряним потоком.
Сили і моменти, різні по місцях докладання і впливу, можна поділити на корисні і шкідливі. Це ні в кого не викликає сумнівів :-), як, втім, і той факт, що в основі вдосконалення аеродинаміки літального апарату лежить необхідність збільшення всього того, що корисно, і зменшення того, що шкідливо.
Робиться все це різними способами і в зв'язку з цим має місце таке поняття як компенсація. Тобто ймовірно, що якийсь небажаний вплив не може бути усунуто, але може бути скомпенсировано, що в загальному-то рівносильно його усунення.
Чого ж такого шкідливого потрібно компенсувати під час польоту літака? Так, в общем-то, вистачає всякого. Але сьогодні зупинимося на моменті аеродинамічних сил, що носять, на мій погляд, дещо екзотичну назву. Це шарнірний момент. Назва його начебто на зв'язок з аеродинамікою не вказує, але насправді зв'язок пряма.
Все просто. Будь-яка управляє поверхню літака пов'язана з іншою конструкцією через шарнір. Відхиляючись в процесі управління, вона відчуває на собі дію аеродинамічної сили, яка, щодо точки обертання цієї поверхні (тобто центру шарніра) якраз і утворює момент, зі зрозумілих вже причин іменований шарнірним.
Чому залежить його величина і в чому, власне, полягає його шкідливість? Хоча правильніше мабуть все ж буде згадати не тільки про шкідливість, а й про корисність шарнірного моменту. Тому підкоригуємо питання: у чому його шкода, а в чому користь, якщо вона є?
Про величину.
Величина моменту, як відомо, визначається величинами сили і плеча цієї сили. Для нашого випадку величина аеродинамічної сили залежить від площі керуючої поверхні. А плече визначається її хордою (те саме, що і хорда профілю ), Тому що чим довше хорда, тим далі точка прикладання сили (тобто центр тиску керуючої поверхні) від точки повороту (тобто центру шарніра).
Зрозуміло, що зі збільшенням геометричних розмірів літального апарату, що вимагають збільшення потрібних розмірів рулів, шарнірний момент теж збільшується. Збільшується він так само з ростом кута відхилення керуючої поверхні.

Схема виникнення шарнірного моменту.
Крім того шарнірний момент зростає з зі збільшенням числа М . Тут причини дві. Перша - це зростання швидкісного напору, що викликає збільшення аеродинамічної сили. Друга причина, більш характерна для великих швидкостей пов'язана з тим, що при переході від дозвукових швидкостей до надзвукових центр тиску аеродинамічних поверхонь (в тому числі і керівників) зміщується назад (про це я згадував тут ).
Цей зсув природно викликає збільшення плеча прикладання сили (щодо шарніра) і, в кінцевому підсумку, зростання величини шарнірного моменту. Ця величина може бути значною, так що саме час згадати про шкоду.
Про шкоду.
Шарнірний момент присутній безумовно, а на великих літаках або ж на великих швидкостях (або ж при тому і іншому разом) він може досягати просто таки надмірних величин.
Так як створюване зусилля передається на елементи системи управління, то вони безумовно повинні мати певну міцність для того, щоб витримати всі ці навантаження. А збільшення міцності дуже часто означає збільшення маси, що ні для якого літального апарату ніяк не можна назвати позитивним фактором.
Крім того є в системі управління одна ланка, яке, в общем-то, неможливо ні зміцнити, ні підсилити. Це пілот, що сприймає на себе через органи управління в кабіні вплив шарнірного моменту на керуючі поверхні.
Так як створюване зусилля передається по елементах системи управління на ручку керування літаком і педалі в кабіні, то льотчик при пілотуванні буде змушений відчувати і долати навантаження, іноді дуже великі, а при певних умовах польоту (на відповідній техніці, звичайно) може просто не впоратися з керуванням. Чи не вистачить мускульної сили ...
Пілотові, як і будь-якій людині, на жаль властиво втомлюватися. Тому, навіть якщо величини шарнірного моменту не стіл грандіозні, все одно практично завжди існує необхідність його зменшення, тобто часткової або навіть повної компенсації, для позбавлення льотчика від зайвих навантажень при пілотуванні.
Це найчастіше означає наявність додаткових систем на літаку, тобто все та ж зайва маса. Звичайно, вона може бути і невеликий, у вигляді декількох малорозмірних тяг або електричних виконавчих механізмів, але може бути і у вигляді важких систем гидроусиления (про це нижче), коли літальний апарат змушений возити з собою набір масивних болванок бустерів і систему їх обслуговування. Шкода наявності :-). Ну, а що ж про користь?
Шкідливі і корисні навантаження.
Режим польоту літального апарату в загальному випадку може бути або маневреним, коли апарат виконує будь-які короткочасні еволюції в польоті, або сталим.
Коли літак довго перебуває в якомусь сталому режимі польоту, штатному або позаштатному (наприклад, в наборі висоти або при несиметричності тяги двигунів), то льотчик, в залежності від умов, буває змушений так само довго прикладає деякі зусилля до органів управління для збереження цього режиму (тобто збалансованості літака), тим самим протидіючи шарнірному моменту. Ці зусилля називаються балансувальними. Вони лише тільки стомлюють льотчика, тому від них бажано позбуватися.
На маневреному режимі і зусилля прикладаються так звані маневрені. Природа їх виникнення все та ж, але значення дещо інше. Звичайно, від них льотчик теж втомлюється, але зовсім від них позбавлятися не можна. Адже відповідно до цього навантаженнями, які льотчик відчуває на ручці управління і педалях, він здійснює пілотаж. Вони дозволяють йому судити про інтенсивність маневру, про перевантаження і поведінці літака.
В цьому якраз і полягає користь (хоч і непряма) шарнірного моменту.
Виходячи з усього цього і розроблені різні конструкторські рішення для боротьби з шарнірним моментом. Принцип їх застосування багато в чому залежить від характеру навантажень, які льотчик сприймає через ручку управління і педалі в кабіні, тобто в общем-то від режиму польоту.
Способи компенсації шарнірного моменту.
В першу чергу будемо говорити про так званої аеродинамічній компенсації.
Суть її полягає в корисному використанні енергії набігаючого потоку повітря. В результаті певних конструктивних рішень на керуючих аеродинамічних поверхнях (рулях) створюються умови для виникнення моменту сил аеродинамічній природи, порівнянного за величиною з шарнірним моментом, але спрямованого в протилежну сторону.
Цей знову виникає момент частково або повністю компенсує шарнірний, тим самим знімаючи з ручки управління зайві навантаження і полегшуючи пілотування. Природа його виникнення аналогічна природі виникнення «нашого шкідливого» моменту, і по суті справи він з себе представляє точно такий же шарнірний момент, тільки виникає на, так би мовити, спеціально відведених для цього місцях.
Осьова компенсація.
Це один з найпоширеніших видів найпростішої аеродинамічній компенсації. Поширена осьова компенсація завдяки її простоті й ефективності, а так само через те, що вона не зменшує ефективність самого керма. Суть її в тому, що вісь обертання рульовій поверхні зміщена назад, ближче до її центру тиску (Тобто точці прикладання аеродинамічної сили). В цьому випадку шарнірний момент зменшується за рахунок зменшення плеча цієї сили.
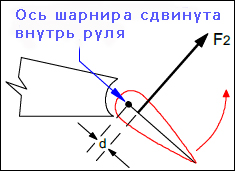
Осьова компенсація.
Така компенсація застосовується в тому числі і на многорежимних літаках (обладнаних системою гидроусиления), літаючих як на дозвукових, так і на надзвукових швидкостях. Вона необхідна для оптимальної розвантаження системи управління і зниження потрібної потужності гідропідсилювачів на всіх числах М польоту, а також для забезпечення можливості аварійного переходу на ручне управління в разі відмови системи гидроусиления. Осьова компенсація суцільноповоротним стабілізаторів таких літаків часто виконується з «перекомпенсацією».
Це означає, що на дозвукових швидкостях точка докладання аеродинамічної сили (центр тиску) при відхиленні стабілізатора знаходиться попереду осі обертання і сприяє подальшому відхиленню стабілізатора в крайнє положення (тобто розвантажує його). На надзвукових швидкостях точка докладання аеродинамічної сили зміщується назад за вісь обертання. Але, внаслідок перекомпенсації на дозвуке, плече сили на сверхзвуке виходить невеликим, а значить невеликим залишається і шарнірний момент.
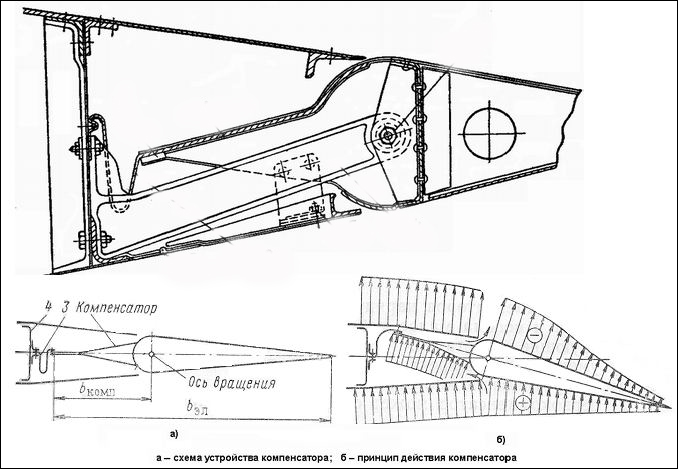
Рогова компенсація.
Інший вид найпростішої аеродинамічній компенсації - це рогова компенсація. Вона зазвичай реалізується на рульових поверхнях килей і стабілізаторів мало- і середньошвидкісних літаків.
У цьому варіанті керуюча поверхню забезпечена так званим роговим компенсатором. Він являє собою частину цієї поверхні (виступ), розташовану перед її віссю обертання і спрофільоване так, що в нейтральному положенні вона формує законцовку кіля або стабілізатора.
А при відхиленні рульової поверхні вона висувається в потік (з'являється ріг) і на ній формується аеродинамічна сила, момент якої щодо осі обертання рульовій поверхні спрямований в бік, зворотний напрямку шарнірного моменту.
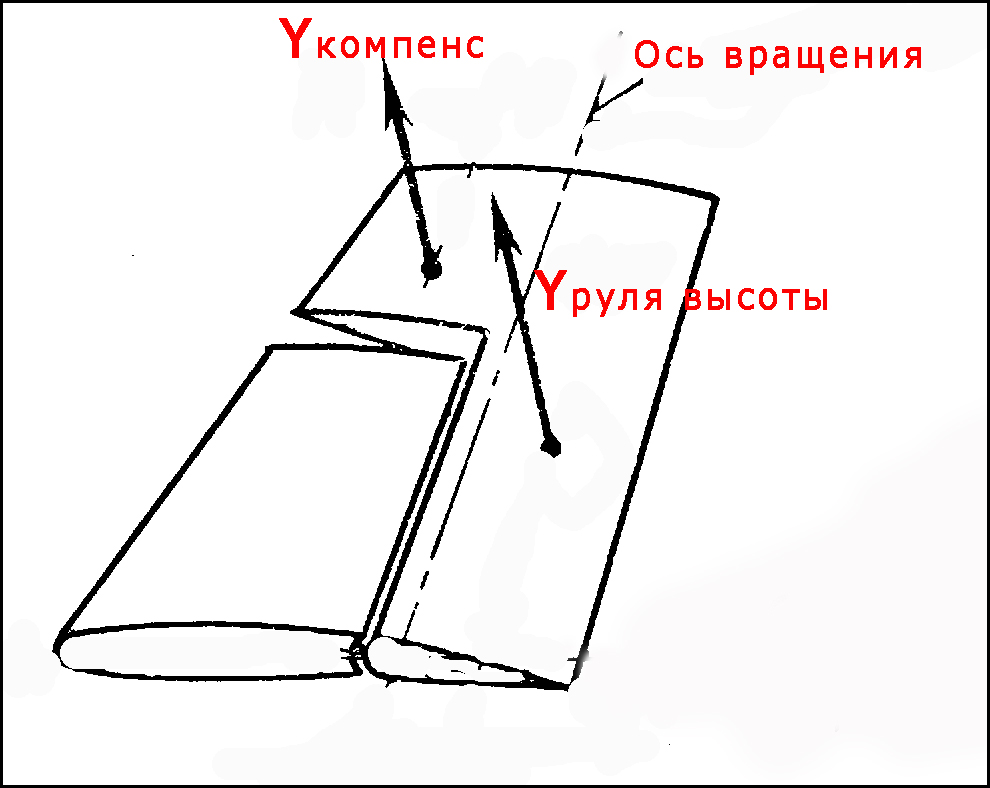
Принцип роговий компенсації.
Істотний недолік роговий компенсації, грунтовно знизив її застосування в сучасній авіації, - це погіршення умов обтікання аеродинамічних поверхонь при польоті на великих швидкостях і при великих кутах відхилення рулів на різних кутах атаки, що викликає відчутне підвищення лобового опору і виникнення вібрацій конструкції.
Для зменшення цього ефекту рогова компенсація може бути використана в комплексі з осьової. Вони доповнюють один одного і дозволяють розширити діапазон їх застосування для різних режимів польоту, тим більше, що в конструктивному плані обидва ці варіанти мають певну схожість ...
Внутрішня компенсація.
При цьому способі носок рульової поверхні поміщається в камеру всередині несучої поверхні (крила), яка розділена на дві частини гнучкою непроникною перегородкою (її називають іще балансування панеллю), з'єднаної з носком і з конструкцією крила. У місцях сполучення рульової поверхні з несучої залишені вузькі щілини, повідомляють внутрішні порожнини з атмосферою.
При відхиленні керма на одній з його поверхонь утворюється область поддавліванія, а на інший область розрідження. Обидві ці області через зазначені щілини повідомляються з внутрішніми порожнинами, в результаті чого гнучка перегородка прогинається в відповідну сторону, захоплюючи за собою всю рульову поверхню.
Принцип внутрішньої компенсації.
Тобто утворюється момент, спрямований в бік, зворотний шарнірному моменту управління. Такий тип компенсації використовують зазвичай на елеронах, на швидкісних літаках. Тут відсутній вихід носка керуючої поверхні в потік, тим самим не збільшується лобове опір. Однак можливі конструктивні труднощі для здійснення такої компенсації на тонких профілях.
Сервокомпенсація.
На дозвукових однорежимні літаках використовуються так звані сервокомпенсатор (від поняття servo-, тобто автоматичне допоміжний пристрій) або флеттнери (по імені винахідника, німецького інженера Антона Флеттнера (Anton Flettner)). Такі компенсатори являють собою невелику керуючу поверхню, що встановлюється уздовж задньої кромки керма.
Конструктивно все виконано так, що ця поверхня автоматично відхиляється в бік, протилежний відхиленню керма. Створювана при цьому аеродинамічна сила на плечі до осі обертання компенсатора врівноважує частково або повністю шарнірний момент керма.
Так як це плече відносно велике, то навіть при малій площі поверхні і невеликих кутах її відхилення величина моменту, який вона створює, виявляється достатньою для ефективної компенсації шарнірного моменту рульової поверхні. Але при цьому сервокомпенсатор трохи зменшує ефективність керма, так як «забирає» частину його поверхні для освіти компенсаційного моменту.
Аеродинамічні сервокомпенсатор за принципом їх управління поділяються на два види.
Перший вид - це так званий кінематичний. У ньому управління поверхнею компенсатора здійснюється за допомогою тяги, пов'язаної з нерухомою частиною несучої поверхні. Тобто чим більше величина відхилення керма, тим більше відхилення поверхні компенсатора. Льотчик при цьому не може впливати на процес з кабіни, але в наземних умовах керуюча тяга в загальному випадку може бути відрегульована на різні кути відхилення.
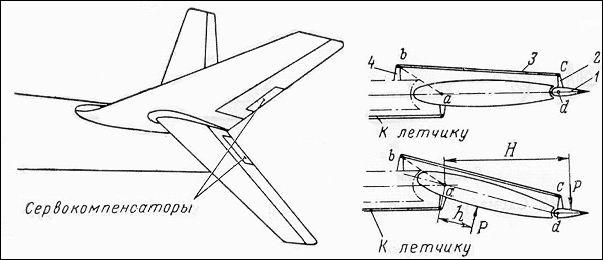
Схема роботи кінематичного сервокомпенсатор.
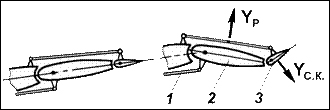
Ще одна схема для кінематичного сервокомпенсатор. 1 - керуюча тяга, 2 - керуюча поверхню, 3 - компенсатор.
Другий вид - більш досконалий - це пружинний сервокомпенсатор. У його конструкції основна ланка - двуплечий важіль, що вільно обертається на осі обертання рульовій поверхні. Одне плече цього важеля затиснуте між пружинами, що мають певну затяжку. Друге пов'язане з головною керуючою тягою і тягою управління поверхнею компенсатора.
Поки навантаження на рульову поверхню (шарнірний момент) невеликі, тобто не перевищують величину затягування пружин, вся конструкція керма обертається під дією головної керуючої тяги як одне ціле і кермо відхиляється без відхилення компенсатора.
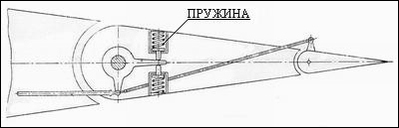
Пружинний сервокомпенсатор.
Але як тільки шарнірний момент досягне якоїсь граничної величини, яка більше затягування однією з пружин, двуплечий важіль починає повертатися, відхиляючи тим самим поверхню компенсатора. Тобто весь механізм як би включається автоматично, знижуючи тим самим зусилля, потрібні для відхилення керма управління.
Виходить, що сервокомпенсатор такої конструкції можна використовувати практично на будь-якому режимі польоту, тому що він працює пропорційно зусиллям, чинним в системі управління, а не кутах відхилення керуючих поверхонь.
Антісервокомпенсатор.
Мабуть слід згадаті и про так званому антісервокомпенсаторе, хоча Функції цього пристрою прямо протілежні Нашої тими. Тобто антісервокомпенсатор НЕ пріменшує шарнірній момент, а навпаки збільшує его. Сам компенсатор відхиляється в сторону зворотну для звичайного сервокомпенсатор. За аналогією з «перекомпенсацією» можна сказати, що відбувається «недокомпенсація» :-).
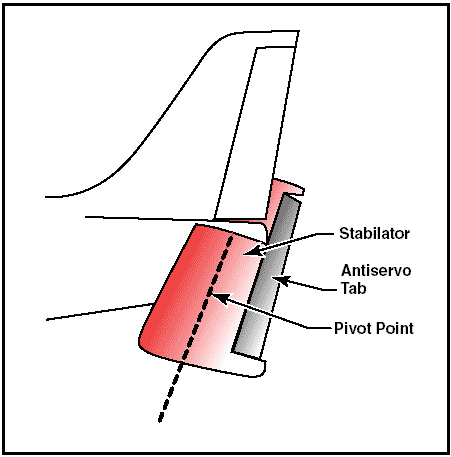
Принцип роботи антісервокомпенсатора.
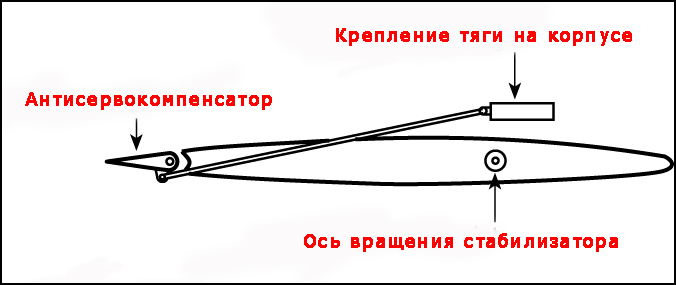
Конструктивне виконання антісервокомпенсатора.

Антікомпенсатор на стабілізаторі літака Piper Рa-28-140 Сherokee. Носок стабілізатора вниз - антікомпенсатор вгору.
Застосовується цей пристрій зазвичай на легкомоторних літаках, які не обладнані окремим кермом висоти. Його функції виконує суцільноповоротним стабілізатор. Така конструкція робить легкий літак досить чутливим в управлінні, тому антісервокомпенсатор «затяжеляет» управління, тобто як би покращує зворотний зв'язок від стабілізатора до пілота з тим, щоб той «не переборщив» і не застосував надмірні переміщення ручки управління.
Тріммірованіе.
Існує ще один спосіб аеродинамічній компенсації шарнірного моменту. Але коштує він дещо відособлено від інших. Справа в тому, що все тільки що описані компенсатори працюють з маневреними навантаженнями (я про них вище говорив), а цей використовується для компенсації навантажень балансувальних (теж про це говорилося :-)).
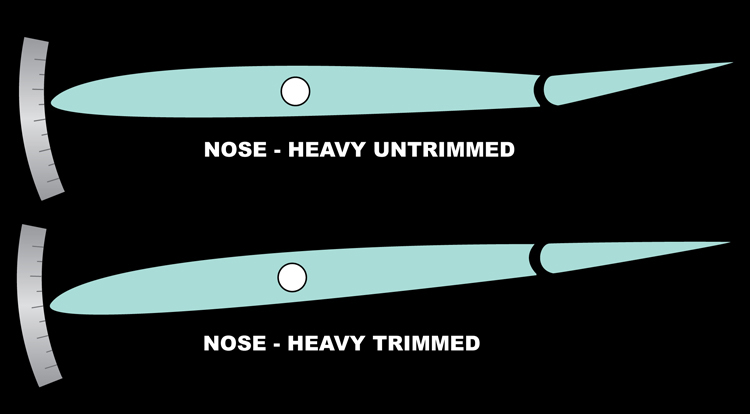
Cпособ носить назву тріммірованіе (від trim, що буквально означає «приводити в порядок»). і в загальному випадку з його допомогою балансування навантаження на органах управління в кабіні можуть бути зменшені до нуля. В цьому випадку літак вважається повністю стріммірованним.
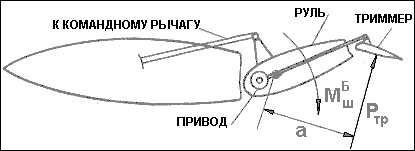
Схема принципу дії триммера.
У традиційних системах тріммірованія активний елемент конструкції при цьому способі - тріммер (власне компенсаційна поверхню), а сама конструкція (як і її аеродинамічний дію) в принципі аналогічна конструкції кінематичного сервокомпенсатор.

Ще одна схема принципу роботи триммера. Тут 2 - триммер, 1 - електромеханізм управління тримерами.
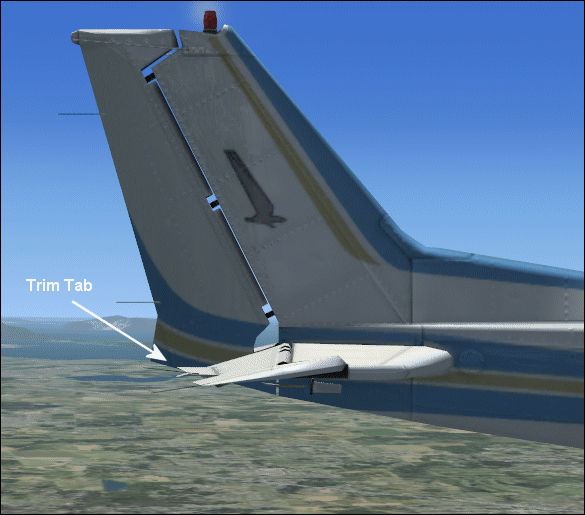
Тример (trim tab) керма висоти.
Тільки триммер має свою власну систему управління (зазвичай механічну або електромеханічну) і може відхилятися льотчиком з кабіни, який в цьому випадку за своїм бажанням обирає або змінює величину компенсації.
Існують ще так звані некеровані тримери. Вони можуть бути використані на нескоростние літаках і встановлюються зазвичай на елеронах і рулях напрямки. Являють собою найчастіше відгинати вручну пластини і використовуються при наявності будь-якої аеродинамічній несиметричності літального апарату.

Принцип дії нерегульованого триммера на елероні літака.

Нерегульований триммер на кермі напряму літака L-29.

Некерований триммер на РН навчально-тренувального літака.

Нерегульований триммер на РН легкомоторного літака.
Такого ж типу пластини встановлюють на лопатях несучого гвинта вертольотів . Вони працюють за таким же принципом і служать для усунення так званої несоконусності лопатей при обертанні, тобто, щоб лопаті не виходили за межі поверхні уявного конуса, утвореного лопатями несучого гвинта при його обертанні.

Нерегульований триммер на лопаті вертольота.
Такі тримери так само підгинаються вручну на підставі даних спеціальних датчиків, отриманих під час наземних випробувань.
Крім традиційної конструкції триммера застосовується також тріммірованіе за допомогою керованого (або пересувного) стабілізатора, хоча цей спосіб вже не можна віднести до аеродинамічній компенсації. Кут установки стабілізатора змінюється за допомогою спеціального механізму, керованого льотчиком з кабіни і не вимагає від нього ніяких зусиль.

Принцип перестановки стабілізатора.
Взаємне переміщення стабілізатора і керма висоти.
У процесі перекладання стабілізатора кут нахилу керма висоти також плавно змінюється, щоб зберегти балансування літака. Все це триває до тих пір, поки аеродинамічна сила, знову з'явилася на стабілізаторі не стане дорівнює силі на кермі висоти, яка була там до початку перекладки. При цьому зусилля на ручці управління в кабіні стає близьким до нуля.
Інші системи.
У загальному випадку застосування керованого стабілізатора дозволяє зменшити розміри керма висоти і, відповідно, потрібні зусилля для його переміщення. Цей спосіб досить ефективний у великому діапазоні центровок і швидкостей, при цьому стабілізатор має менший лобовий опір, ніж з традиційним тримерами.
Однак, сама система перекладки стабілізатора в порівнянні зі звичайним тріммірованіем має більшу вагу. Крім того існує необхідність чіткого виконання правил і параметрів установки стабілізатора перед зльотом відповідно до центровкой літального апарату. Недотримання цих правил загрожує важкими льотними пригодами.

Регульований стабілізатор літака Embraer ERJ-190.
Крім регульованого стабілізатора існують і інші системи, в яких зменшення сприймаються навантажень здійснюється за рахунок зменшення площі керуючих поверхонь, але при цьому без зниження ефективності самих систем управління в цілому.
В першу чергу це так званий серворуль. У такій конструкції головна керуюча поверхню, тобто власне кермо вільно підвішений на своєму шарнірі і не пов'язаний з системою управління, яку контролює пілот. Але на його кінці так само шарнірно підвішена в кілька разів менша за площею аеродинамічна поверхня (зовні схожа на тріммер), яка носить назву серворуль і яка як раз і управляється льотчиком з кабіни.
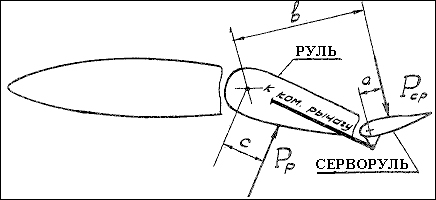
Схема дії серворуля.
Відхиляється серворуль в сторону, зворотну потрібного об'їзду головного керма. Виникає при цьому на ньому сила змушує вільно підвішений основний кермо відхилятися в потрібному напрямку. Це відхилення буде відбуватися до тих пір, поки момент від сили на Сервокермо не врівноважує шарнірний момент (той самий шкідливий, який потрібно зменшити) на головному кермі.
Така рівновага можливо через велику різницю плечей сил діючих на кермі і Сервокермо. При цьому льотчик на ручці управління відчуває тільки зусилля на Сервокермо, тобто зовсім невеликі, тому що сам серворуль має невелику площу.
Основні недоліки систем управління з Сервокермо - це деяке запізнювання в відхиленні основного керма і відносне погіршення його роботи на малих швидкостях.

Спільне використання елеронів і елерон-інтерцепторів для поперечного управління.
Ще один приклад використання того ж принципу. Це застосування елерон-інтерцепторів в каналі поперечного управління. Самі ці органи управління приводяться в дію окремою системою і не впливають на зусилля на ручці управління літаком. Але їх паралельне з елеронами застосування крім ряду інших позитивних моментів (тема для іншої статті :-)) дозволяє зменшити площу елеронів, а значить і величину шарнірного моменту на них.
Використання бустерів в системі управління.
Способів компенсації шарнірного моменту, як бачите, вистачає. Однак, як уже говорилося раніше, величина його з ростом розмірів літального апарату і швидкості його польоту зростає. Рано чи пізно може настати такий момент, коли жоден з існуючих прийомів компенсації вже не буде ефективний (особливо це стосується маневрених навантажень).
Щоб це уникнути і збільшити можливості пілотування людиною літального апарату на різних режимах на багатьох сучасних швидкісних (або великорозмірних) літаках в каналах управління використовують гидроусиления, суть якого в тому, що льотчик, переміщаючи ручку управління, впливає тільки на переміщення маленького золотника (сервоклапани), тобто спеціального керуючого елемента в системі автоматики управління.
А вже цей золотник формує і надає керуючий вплив на великий гідроциліндр (бустер), який пов'язаний безпосередньо з літаковими кермом.
Однак, якщо говорити точніше, то за характером впливу на цей сервоклапан системи гидроусиления діляться на два види.
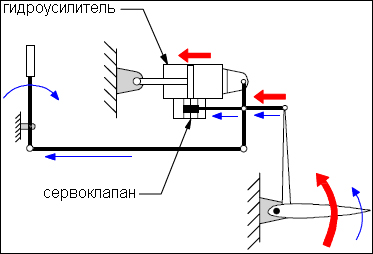
Схема гідросистеми посилення оборотного типу.
Перший - це так звані системи оборотного типу. Особливість принципу їх роботи (до речі, такого ж як в автомобільних системах посилення керма) полягає в тому, що для приведення в дію всієї системи (починаючи з золотника-сервоклапани) необхідно докласти певних невелике початкове зусилля, яке зрушує керуючу поверхню разом з сервоклапанів. Надалі вже в роботу по повній в ступають гідропідсилювачі (бустери) і пілот використовує управління в повному обсязі.
Позитивною стороною такої системи є той факт, що пілот при її використанні відчуває на ручці і педалях все ті ж маневрені навантаження у вигляді шарнірного моменту. Не в повному обсязі, звичайно, але цього достатньо для правильного пілотування. А недолік її в тому, що при великих швидкостях / розмірах літака навантаження можуть зрости настільки, що пілот вже не зможе зробити початковий зсув для введення системи в дію.
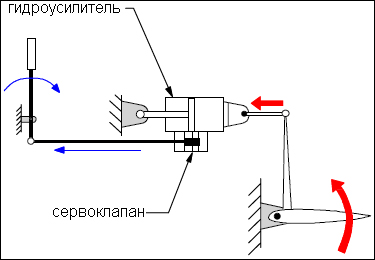
Схема гідросистеми посилення незворотного типу.
Ось для таких літаків і режимів польоту існує другий вид гідросистем посилення - системи незворотного типу. При використанні таких систем повністю відсутня зворотний вплив польотних навантажень на ручку управління, і льотчик не відчуває навіть малої частини тих навантажень, які сприймає на себе рульова поверхню. Всі ці навантаження повністю замикаються на гідропідсилювач.
Але, як уже згадувалося раніше, льотчика не можна повністю позбавити відчуттів, властивих всьому процесу управління. Адже за допомогою цих відчуттів він «відчуває» літак, і без них цього самого управління просто не буде.
Тому на літаках, що використовують в системах управління гідропідсилювачі незворотного типу, застосовують спеціальні пристрої, включені в лінію проводки управління, які імітують польотні зусилля на ручці управління і педалях. Це різні механізми (пружинні) та гідромеханізму завантаження, автомати регулювання завантаження.
Автомати регулювання використовують дані про швидкісному напорі, отримані від датчиків повного і статичного тиску повітря, створюючи тим самим реальну картину, відповідну ручного управління.
Спільно з механізмами завантаження працюють і механізми триммерного ефекту, так само імітують роботу триммеров, як при повністю ручному управлінні.

Механізм триммерного ефекту вертольота.
Механізми триммерного ефекту в цьому випадку мають принципове схожість з пристроєм тріммірованія на вертольоті. Так як конструктивно виконати на вертольоті тримери подібно літаковим не представляється можливим, то розвантаження ручки управління вертольота в найпростішому випадку виконується з використанням електромеханічного пружинного розвантажувального пристрою.
==========================
На цьому, мабуть, і все. Такі загалом і в цілому способи і технічні рішення для обмеження або ж усунення ефекту шарнірного моменту в системі керування літальним апаратом. Всі вони застосовуються в тій чи іншій мірі. Якісь часто, якісь значно рідше, в залежності від призначення і конструкції літака і вертольота.
Однак вся техніка, як і і системи управління, досить швидко вдосконалюється. Вже зараз проглядається тенденція перетворення льотчика (особливо на сучасних лайнерах останнього покоління) з особи активно пілотує в обличчя пасивно контролює :-), за яке думає комп'ютер, а пілотування здійснюють підкоряються йому пристрої та системи автоматики, в яких в тому числі і процес тріммірованія виконується автоматично.
Якщо так піде далі, то рано чи пізно настане момент, коли всі вищеописані технічні хитрощі виявляться непотрібними ....
Може бути ... Не виключено ... Але, мабуть не зараз ... Не в найближчому майбутньому :-) ....
На закінчення деякі характерні фотографії по темі, які в текст впихати не став 🙂 ...
До новой зустрічі.

Літак Vought F4U Corsair.

Хвостове оперення літака Vought F4U Corsair. Видно сервокомпенсатор керма напряму і керма висоти (зовнішній), триммер керма висоти (внутрішній). Компенсація рулів осьова (певне конструктивне схожість з рогової).

Робота сервокомпенсатор РН і РВ літака Vought F4U Corsair.

Колесо механічного управління тримерами керма висоти літака Cessna-172.

Кабіна літака Boeing 737 Classic. Колеса (штурвали) управління перестановкою стабілізатора на середньому пульті.

Кабіна Airbus 320-214. Добре видно органи управління тріммірованіем по тангажу (колеса з білими мітками).
No related posts.
Чого ж такого шкідливого потрібно компенсувати під час польоту літака?Чому залежить його величина і в чому, власне, полягає його шкідливість?
Тому підкоригуємо питання: у чому його шкода, а в чому користь, якщо вона є?
Ну, а що ж про користь?
