
- Зі світу медицини - в світ автономного транспорту
- Як працює автопілот зсередини
- А причому тут Volvo?
Колись ITC.ua вже розповідав про автономне транспорті : Технології, особливості, проблеми. постійно виходить багато новин і заміток на дану тему. Та й я, як автор оглядів автомобілів, приділяю чимало уваги різним системам допомоги водієві, які частково беруть управління на себе. Але ніколи раніше не вдавалося зазирнути "всередину" системи автопілота. До сьогодні…
Зі світу медицини - в світ автономного транспорту
Ми ведемо неспішну бесіду на даху офісу GlobalLogic і представники компанії побіжно обумовлюються: мовляв, «ми потрапили в світ автономного транспорту зі світу медичного обладнання». Як так?! Весь секрет у нюансах написання програмного коду. У медицині потрібно дуже висока частка відповідальності при створенні ПЗ: написання коду, багаторазове тестування, документація всіх процесів. Фактично помилка в ПЗ повинна бути якщо не «нуль» (все в абсолют зводити не можна), то практично «зведена до нуля» - адже на кону людське життя. Саме цей підхід зацікавив багато компаній, які займаються розробкою ПЗ для автономного транспорту. Почавши з адаптації інтерфейсу систем мультимедіа, компанія GlobalLogic змогла зарекомендувати себе надійним партнером, показати свої навички і формат процесів в написанні ПО - що призвело до більш складним завданням з написання програмного коду для автономного транспорту.
Виходить, що якщо процес створення ПЗ документований, то в разі ДТП з автономним транспортом можна знайти відповідальну людину-програміста? І так і ні. Спочатку відповідальність лежить на виробнику автомобіля, який використовував ці програми для створення свого автономного транспорту. А вже він, в судовому порядку і при наявності відповідних договорів, може перекласти відповідальність на компанію-розробника ПЗ. Далі вже всередині компанії можна знайти конкретного програміста, хто відповідав за цю частину коду. Але останній крок малоймовірний, адже програмне забезпечення для автопілота, яке віддає компанія-розробник виробнику автомобіля - це вже комплексний готовий продукт: і програміст, і тестер, і директор, хто все це підписав «в готовність».

Спікери зустрічі: Артем Ткаченко, бренд-директор Volvo в Україні; Андрій Яворський, програм-директор компанії GlobalLogic; Роман Разуваєв, керівник напрямку Automotive компанії GlobalLogic.
А адже продукт непростий: за заявами представників GlobalLogic, сьогодні в сучасних автомобілях понад 100 млн. Рядків програмного коду - більше, ніж було в літаках минулих поколінь. А з повноцінним автопілотом буде ще більше. Але, в той же час, продукт дуже затребуваний ринком: очікується, що перші повноцінні автопілот для автомобілів будуть готові в 2020-2022 році (оптимістичний сценарій) або, найпізніше, в 2025-2030 році (песимістичний сценарій). Точний термін появи автопілота залежить від ціни і класу автомобіля: тому що це недешева технологія, то першим автопілот отримують дорогі автомобілі люкс-класу, пізніше автопілот з'явиться і в більш доступних авто.
Наступне питання - що можна назвати «повноцінним автопілотом»? Це автопілот четвертого-п'ятого рівня, тобто автопілот, який може виконувати всі операції практично без вимоги уваги і впливу з боку водія. Важливо відзначити, що з розвитком теми автопілота прийшла необхідність його стандартизації. Вперше це зробила організація SAE (Society of Automotive Engineers), яка запропонувала п'ять рівнів системи автопілота, плюс «нульовий» базовий рівень. Отже:
- Рівень «0» - немає великої кількості систем контролю над автомобілем, все в руках водія.
- Рівень «1» - є круїз-контроль, адаптивний «круїз», контроль рядності руху, пр.
- Рівень «2» - електроніка може брати на себе керування автомобілем в деяких ситуаціях, наприклад, рух по трасі з плавними поворотами (адаптивний «круїз» і активна система контролю рядності), але водій повинен бути готовий в будь-який момент взяти керування автомобілем на себе .
- Рівень «3» - електроніка може контролювати автомобіль в більшості ситуацій: траса, виїзд на багатосмугові дороги, парковка, але водій як і раніше повинен бути готовий взяти керування автомобілем на себе.
- Рівень «4» - електроніка може контролювати автомобіль у всіх ситуаціях, увагу водія практично не потрібно, крім екстрених випадків.
- Рівень «5» - електроніка повністю контролює автомобіль без впливу людини, від людей вимагається лише задавати початковий і кінцевий пункт поїздки. Кермо і педалі зовсім не потрібні, їх не буде.
Дотримуючись цієї градації, сьогодні компанія Tesla знаходиться на третьому рівні та намагається зробити крок далі, ряд інших провідний виробників автомобілів - переходять з другого на третій. Хоча в реальності і на рівні експериментів - вже є автомобілі з 4-5 рівнем автономного водіння, вони реально їздять по дорогах. Наприклад, компанія Volvo в Швеції проводить експеримент з реальними сім'ями, які їздять на автомобілях компанії з п'ятим рівнем автономності. Але ось у чому нюанс: дані рівні «в залізі» (різних датчиках, сенсорах, радарах, камерах) відрізняються тільки в рамках «0-1-2-3», проте перехід на більш високі рівні «3-4-5» фактично є питанням більш розумного програмного забезпечення. І компанія GlobalLogic, раптом, але є одним з ключових розробників ПЗ для автономного транспорту.
Як працює автопілот зсередини
Одна з найбільших складнощів в розробці автопілота - це позиціонування на місцевості. Адже якщо для GPS-навігатора похибка 5-10 метрів допустима (все одно людина очима побачить потрібний йому поворот), але для автопілота похибка навіть в 1-2 метра - це можливе ДТП і каліцтва людей. Тому автопілот повинен ясно бачити картинку навколо автомобіля і розуміти місцевість, де він знаходиться. Тут необхідні і сигнали системи позиціонування GPS (загальне розуміння місця розташування), і різні датчики, радари, лідари (позиціонування себе відносно інших автомобілів, будинків, дерев, предметів), і камери огляду (фіксація того, що відбувається попереду і навколо автомобіля, побудова додаткових точок-перешкод , що не розпізнаних радарами).
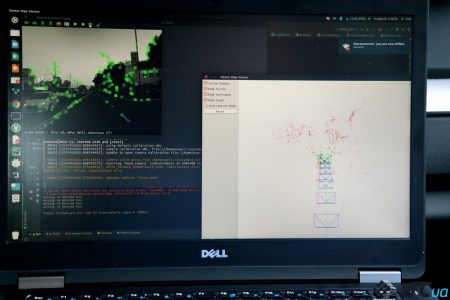
Як автопілот бачить ситуацію перед собою? Ось лише один варіант - за допомогою звичайної веб-камери або відео-реєстратора. На всіх видимих об'єктах розставляються точки, потім вони переносяться на окремий екран і створюють якийсь «коридор» перед автомобілем. Якщо цей коридор накласти на GPS-карту і додати дані від радарів - то в результаті автопілот отримає загальну картинку ситуації навколо себе. Навіщо це потрібно?…
А ось це вже критично важливе питання. Тому, що дорожня обстановка - це ситуація як з постійними (напрямок траси, будинки і дерева), так і з мінливими даними (автомобілі, люди, ями, полій). Відповідно, система автономного транспорту повинна працювати як з постійними даними (прокладати свій маршрут за допомогою комп'ютерної карти і GPS), так і з мінливими даними. Великий плюс - якщо автономні автомобілі почнуть обмінюватися інформацією між собою: «агов, хто там ззаду - через 300 метрів дорога обледеніла, краще знизити швидкість».
Подібні напрацювання вже є: наприклад, компанія Volvo має хмарний сервіс, де «розумні» автомобілі Volvo можуть спілкуватися між собою, передаючи різну інформацію. Однак поки це працює тільки для Volvo - система не може працювати з автомобілями Audi, Mercedes, Nissan, Citroen, і ін. Так само як і навпаки: виходять системи обміну даними між автомобілями одного бренду, нерідко - ще й в одній територіальній зоні (країна, область, регіон). У цьому стоїть величезне завдання для автономного транспорту: знайти один стандарт для передачі даних. Причому не тільки по маршруту «автомобіль-хмара-автомобіль» (V2X або V2G), але і по маршруту «автомобіль-автомобіль» (V2V) - важливі повідомлення повинні передаватися безпосередньо і максимально швидко: «увагу все хто ззаду - я екстрено гальмую» . У той же час, хмарні сервіси дають більше можливостей систем автономного управління транспортом: частина рішень про управління автомобілем можна приймати віддалено, частина рішень можна приймати на борту автомобіля - і це істотно знижує вимоги до обладнання автопілота.
Які рішення можна приймати віддалено? Наприклад: як планувати маршрут з урахуванням ДТП або пробок попереду, враховувати нові знаки, перебудується в інший ряд, якщо є інформація про ямах або обмерзання дороги. Які рішення слід приймати на місці? Наприклад, рішення про екстрене гальмування перед раптово вискочив на дорогу дитиною або звіром. Але тут виникає наступне питання: які рішення вважати віддаленими, а які екстреними? Умовно екстрені рішення - це все, що вимагає уваги і дій на протязі 1-3 секунд (або менше того); віддалені рішення - це все, що можна обробити протягом 3-5 секунд (або більш того). Поки дані тимчасові інтервали є умовністю і можуть коригуватися, але загальна ідея вже зрозуміла: поділ інформації на дві частини - вимагає обробки негайно в автомобілі або з можливістю віддаленої обробки за деякий час в хмарному сервісі.
У підсумку - що робить GlobalLogic? Компанія розробляє ПО, яке зчитує інформацію, обробляє її, виносить рішення і передає ці рішення на керуючий орган автомобіля. Під час презентації було продемонстровано віртуальна карта і схеми-автомобілі, які їздили по вулицях комп'ютерного міста. У момент їх перетину на панелі приладів видається червоний сигнал: в реальному автомобілі - це і є сигнал на керуючий орган, наприклад, гальма: екстрена зупинка, інакше може бути аварія! Компанія-розробник ПЗ повинна передбачити не тільки перетин двох автомобілів, але і масу інших моментів: дерево праворуч, вискочив з лісу лось, автомобіль попереду раптом розгортається через суцільну осьову ... На кожну подібну задачу повинен бути відповідь: гальмувати або постаратися ухилитися? Якщо гальмувати - чи немає позаду «наздоганяючого» автомобіля? Якщо ухилитися - чи вистачить ширини дороги, наскільки повернути кермо? А якою буде крен автомобіля з урахуванням поточної завантаження - раптом різкий поворот призведе до перекидання? Маса ситуацій, які потрібно створити, прогнозувати - і, в підсумку, знайти відповідь на подібному стенді-симуляторі.
До слова, хмарні сервіси зажадають величезного потоку даних. І представники GlobalLogic стверджують, що в Європі саме виробники автомобілів є головними ініціаторами і лобістами розвитку мереж 5G - якраз з прицілом на системи автопілота, який повинні бути «он-лайн».
А причому тут Volvo?
Все просто: компанія GlobalLogic розробляє ПО для систем автономного водіння, де одним з клієнтів є компанія Volvo Cars. Мало того, сьогодні Volvo є однією з найбільш передових компаній в автомобільному світі. Чому так? Тому, що змінюється не тільки сам автомобіль, але і мислення навколо нього.
Вже зрозуміло, що сьогодні одним з ключових трендів у розвитку автомобілів є електрофікованого автомобілі: гібрида (наприклад, Volvo ХС90 T8 ) І чисті електромобілі. Останній істотно простіше в своїй конструкції: акумулятор, електромотор, інвертор-перетворювач струму - ось і все. А це, в свою чергу, приблизно однаковий (і високий) рівень надійності: в електромобілі просто набагато менше деталей і вузлів, які можуть зламатися. У той же час електромотор дає більш широкі можливості керування напрямком руху (два електромотора правою / лівою для управління вектором тяги), впливає на розгін і уповільнення. Додайте сюди більш сучасні шини, пневматичну підвіску, електронно-керовані амортизатори. Все це призводить до того, що межі між «фірмовою» налаштуванням кожної марки стираються: підвіска м'якше / жорсткіше, кузов вище / нижче, розгін швидше / спокійніше - все це можна налаштувати. Додайте до цього погляди сучасних підлітків, які вже не бачать в автомобілі засіб самовираження чи статусу, а бачать лише транспорт: літак, автомобіль, моноколесо, метро - та що завгодно, головне дістатися до пункту призначення. У підсумку ми переходимо від конкуренції між автомобілями на рівні «керованість / комфорт / обробка» до конкуренції на рівні сервісу, послуг. Хто запропонує більш зручний сервіс, більше спектр послуг - то і в «дамках».

Автомобілі Volvo є одними з найбільш передових у світі, компанія також націлена на розробку автономного транспорту. А тому імпортер Volvo в Україні вирішив підтримати захід і розповісти про бачення компанії в даній області ...
Компанія Volvo розраховує, що до 2025 року у неї буде 5 млн. Абонентів (НЕ власників! А саме абонентів), які будуть користуватися автомобілями Volvo. Перший дзвіночок вже пролунав з запуском кросовера Volvo XC40 - одночасно був запущений і сервіс Care by Volvo : Не володіння автомобілем, а саме використання автомобіля за передплатою з фіксованою місячної абонентською платою і можливістю зміни автомобіля через два роки. Якщо додати до цього повноцінний автопілот, то він дозволить кільком людям використовувати один автомобіль, який буде сам під'їжджати туди і тоді, куди його викликали.
Однак Volvo йде ще далі - недавно компанія представила концепт Volvo 360с , З яким знову намагається поставити нові правила використання автомобіля. Наприклад, потрібно з'їздити в інше місто за 300 км і бути там до ранку завтрашнього дня. Можна їхати на автомобілі і витратити на це 3-4 години; можна полетіти літаком (0,5-1 годину) або поїхати швидкісним поїздом (1,5-2 години), але якщо додати час під'їзду до аеропорту або вокзалу - то отримаємо порівнянні 3-4 години. І ось тут компанія Volvo пропонує альтернативу: можна взяти концепт 360С, поставити йому кінцеву точку маршруту, виїхати ввечері і лягти в ньому спати - нехай він їде неспішно, але в запасі все одно є 7-8 годин - в результаті до наміченого часу ви опинитеся в пункті призначення. А поки ви будете проводити необхідні зустрічі в місті, концепт 360С може розвозити інших людей або відправиться на підзарядку акумуляторів. Ось для чого потрібен автономний транспорт.
Звичайно, тут багато застережень для України: нерівні дороги - який там сон, стерта розмітка і «одноокі» автомобілі - щоб хоч автопілот не заблудився і не помилився ... Але все-таки: компанія Volvo дає своє бачення транспорту майбутнього і можливостей використання автопілота. Який в найближчі 5-10 років повинен стати однією з найбільших революцій в автомобільному світі поряд з масових виходом електрокарів. І, як бачите, ця революція створюється, в тому числі, і всередині українських компаній.
Як так?Виходить, що якщо процес створення ПЗ документований, то в разі ДТП з автономним транспортом можна знайти відповідальну людину-програміста?
Наступне питання - що можна назвати «повноцінним автопілотом»?
Як автопілот бачить ситуацію перед собою?
Навіщо це потрібно?
Які рішення можна приймати віддалено?
Які рішення слід приймати на місці?
Але тут виникає наступне питання: які рішення вважати віддаленими, а які екстреними?
На кожну подібну задачу повинен бути відповідь: гальмувати або постаратися ухилитися?
Якщо гальмувати - чи немає позаду «наздоганяючого» автомобіля?
