Модуль датчика нахилу оснащений датчиком нахилу і потенціометром. Ви можете прикріпити його до будь-якого об'єкту, і він визначить, нахилений об'єкт чи ні. На цьому уроці ми дізнаємося, як працює сенсорний модуль нахилу і як його використовувати з Arduino Board для визначення кута нахилу або руху.
комплектуючі:
- Arduino UNO rev.3 x 1
- Модуль датчика нахилу x 1
- перемички
- Кабель USB x 1
Програмне забезпечення:
- Arduino IDE (версія 1.6.4+)
Про модулі датчика нахилу
Датчики нахилу є важливими компонентами систем охоронної сигналізації сьогодні. Сенсорні датчики нахилу визначають кут нахилу або рух. Датчики нахилу можуть бути реалізовані з використанням технології ртуті і роликових кульок і можуть бути встановлені з використанням механічної різьблення, магнітів або клеїльні засоби залежно від того, на який тип поверхні вони встановлюються.
Особливості
- Використання високочутливого кутового перемикача SW-520D в якості датчика
- Вихідний сигнал компаратора чистий, хороша хвильова форма, здатність водіння, ніж 15 мА
- Робоча напруга 5 В
- Формат виведення: Цифровий вихід (0 і 1)
- Фіксована отвір для болта для легкої установки
- Маленький розмір друкованої плати: 3,2 см x 1,4 см
- Використання шірокораспространенние компаратора напруги LM393
Недавні технологічні досягнення в області виготовлення датчиків нахилу поліпшили точність, знизили вартість і збільшили термін служби. Тип SW-520D є широко поширеним датчиком нахилу роликового типу, що складається з двох провідних елементів (полюсів) і проводить вільної маси (кулі кочення), інкапсульованого в тому ж корпусі. Коли датчик нахилу орієнтований так, що цей кінець спрямований вниз, маса укочується на полюса і шорт їх, діючи як хід перемикача. Мікроконтроллерні модулі датчиків нахилу на основі SW-520D також доступні за доступними цінами.
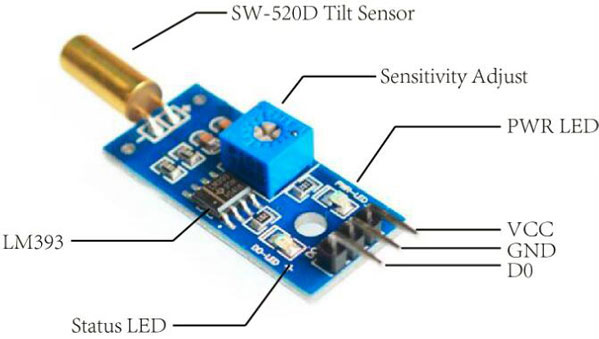
Схема електроніки за цим крихітним модулем зазвичай зосереджена навколо двопроцесорного чіпа LM393. Модуль оснащений датчиком нахилу, підсилювачем сигналу, стандартним 4-контактним роз'ємом, індикатором, який сигналізує про правильне харчування модуля, і індикатор стану, який загоряється, коли датчик нахилу виявляється датчиком нахилу.

Цей модуль видає логіку LOW, коли датчик нахилений нижче порогового кута; логіка HIGH, коли вона нахилена вище порогового кута. Кут порога становить від 45 до 130 градусів. Крім порогового кута кутова швидкість також впливає на модуль нахилу. Він також може використовуватися в якості датчика вібрації!
Пріемр проекту - "Перемикач нахилу"
У цьому прикладі ми будемо використовувати модуль перемикача нахилу і вбудований світлодіод, який був прикріплений до контакту 13 плати Arduino UNO, щоб побудувати просту схему. Потім перемикач нахилу виводить низькі сигнали, і світлодіод буде горіти. В іншому випадку він відключиться.
З'єднання датчика з контролером
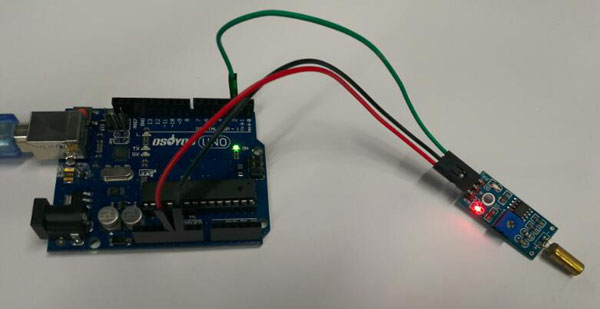
Побудуйте схему наступним чином:
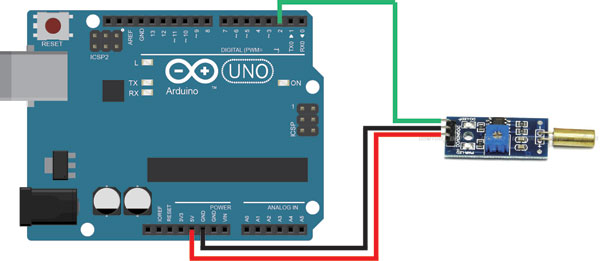
Модуль датчика нахилу може бути підключений до Ардуіно за допомогою відповідних перемичок. Перш за все підключіть лінії електроживлення; VCC і GND модуля до 5V і GND Arduino відповідно. Потім підключіть цифровий вихід (DO) модуля до цифрового виходу 2 (D2). Все обладнання повинно живитися від джерела живлення 9 В постійного струму / USB через гніздо DC IN / USB плати Arduino. Тримайте положення перемикача нахилу в вертикальному положенні.
кодова програма
Після завершення вищевказаних операцій підключіть плату Arduino до комп'ютера за допомогою USB-кабелю. Зелений світлодіод харчування (позначений PWR) повинен тривати. Відкрийте IDE Arduino і виберіть відповідний тип плати і тип порту для вашого проекту. потім завантажте скетч на свою плату Arduino.
const int sigPin = 2; // номер контакту перемикача нахилу const int ledPin = 13; // номер світлодіодного виведення // змінні будуть змінюватися: boolean sigState = 0; // змінна для читання стану перемикача нахилу void setup () {// ініціалізує світлодіодний висновок в якості виходу: pinMode (ledPin, OUTPUT); // Ініціалізуйте висновок перемикача нахилу в якості входу: pinMode (sigPin, INPUT); } Void loop () {// зчитує стан значення перемикача нахилу: sigState = digitalRead (sigPin); if (sigState == HIGH) {// включити світлодіод на: digitalWrite (ledPin, LOW); } Else {// вимкнути світлодіод: digitalWrite (ledPin, HIGH); }}
результат виконання
Через кілька секунд після завершення завантаження нахил перемикача, коли він нахиляється до будь-якої зі сторін, поки ступінь нахилу і сила відповідають умові, перемикач буде під напругою; таким чином, він буде виводити сигнали низького рівня. Потім перемикач нахилу виводить низькі сигнали, і світлодіод буде включений. В іншому випадку він відключиться.